CW med fjärrstyrd Radio

Bilden visar en TS-480 men CW funktionerna är lika oavsett radiostation.
From v 1.44 är stödet för telegrafi körning avsevärt förbättrade.
Vi har nu implementerat en CW keyer i Remoterig mjukvaran för att göra CW-körningn möjlig även vid längre Internet fördröjningar eller mycket Jitter. Tidigare var vi beroende av att höra medhörningen från radion vid CW körning vilket inte var lätt för hjärnan om fördröjningar blev längre än 20-30 ms. Med CW-keyern inbyggd i Remoterig boxen så löser man det problemet eftersom också medhörningen genereras lokalt.
Förutom den lokala medhörningen så finns det också en funktion som håller ljudet från radio avstängt x ms efter en kort eller lång teckendel är sänd (lf delay ms). Detta innebär att eventuell medhörning från radion automatiskt hindras från att höras. Även om du kan stänga av medhörningstonen ute i radion så kan störande klick eller andra störande ljud uppstå som är skönt att bli av med. Tiden som ljudet hålls avstängt under kan justeras beroende på vilken fördröjning man har över Internet. Ett bra startvärde om man vill använda funktion är lite mer än pingtiden, man har mellan kontroll och radio QTH. Defaultvärde är 0 dvs ingen avstängning annat än under det att teckendelen sänds.
En annan viktig och tror jag unik funktion i dessa sammanhang är ett slags justerbar jitterbuffer för CW sändningen i radioänden. Detta innebär att om du har en Internet förbindelse där inte fördröjningen är konstant så kan du sätta en liten fördröjning innan nycklingen av sändaren startar. På det här viset får Radio RRC:n tid att återskapa telegrafisändningen så att den blir exakt som den skapades i kontroll RRC:n. Systemet blir härigen mycket tolerant mot varierande fördröjningar sk. Jitter. Det är med inställningen "key delay ms" som man anger hur lång bufferten skall vara. Högre värde ger större tolerans mot gitter men också större fördröjningar så man får prova sig fram till ett passande värde. Även om du har en bra förbindelse så skadar det inte att prova med ett lågt värde. Kom ihåg att om du använder lf delay och sedan anger ett värde på "key delay" så måste du öka "lf-delay" med motsvarande värde för att bibehålla önskad effekt.
Här kan du lyssna på en telegrafi sändning där en Internet simulator lagt till ett slumpmässigt Jitter på max +- 10 ms.
http://www.remoterig.com/CW jitter-100-10-50.wav
nedan är samma sändning men här är "key delay ms" satt till 50 ms och man har därigenom fått en rekonstruktion av sändningen som är mycket tydlig.
http://www.remoterig.com/CW jitter with corr-100-10-50.wav
CW keyer inställningarna finns på "Keyer Settings" sidan. parametrarna är också beskrivna på Common configs sidan.
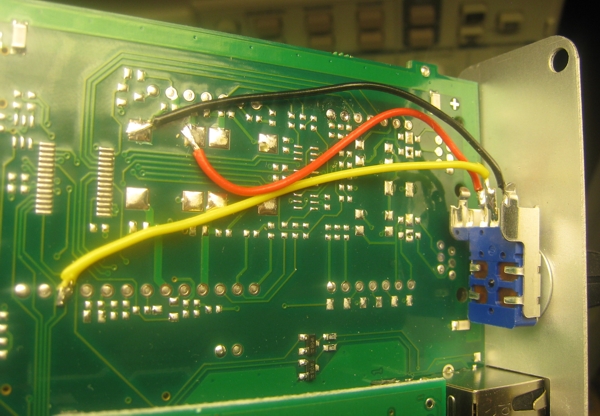
Om du vill kunna ställa in CW-hastigheten via en Potentiometer så kan du montera en sådan på RRC:ns front. Du behöver en linjär pot, värdet kan vara från 4,7 K up till 470K eftersom den bara fungerar som spänningsdelare. Bilderna nedan tror jag är tillräcklig instruktion för hur den kan monteras. Den röda tråden är kopplad till 3V3, den svarta till GND och den gula är ansluten till A/D ingången på CPU:n.

Keyer utgång
Utgången från CW keyern är
tillgänglig på I/O kontakten på RRC:ns baksida. Pin 5 jordas av en FET vid
nyckling. Pin 8 är GND.
CW-nyckling från PC
Jag tror inte jag är den ende som
också vill sända telegrafi direkt ifrån Loggprogrammet i datorn. För att
lösa detta dilemma så har vi implementerat mjukvarustöd för en
PC-nycklingsingång i kontroll RRC:n. Tråkigt nog så finns ingen ingång
förberedd för denna funktion eftersom RRC:n ursprungligen designades för
nått helt annat, men det är ganska enkelt att fixa en ingång för detta. Det
måste finnas nått slags skydd för processorporten det kan man ganska enkelt
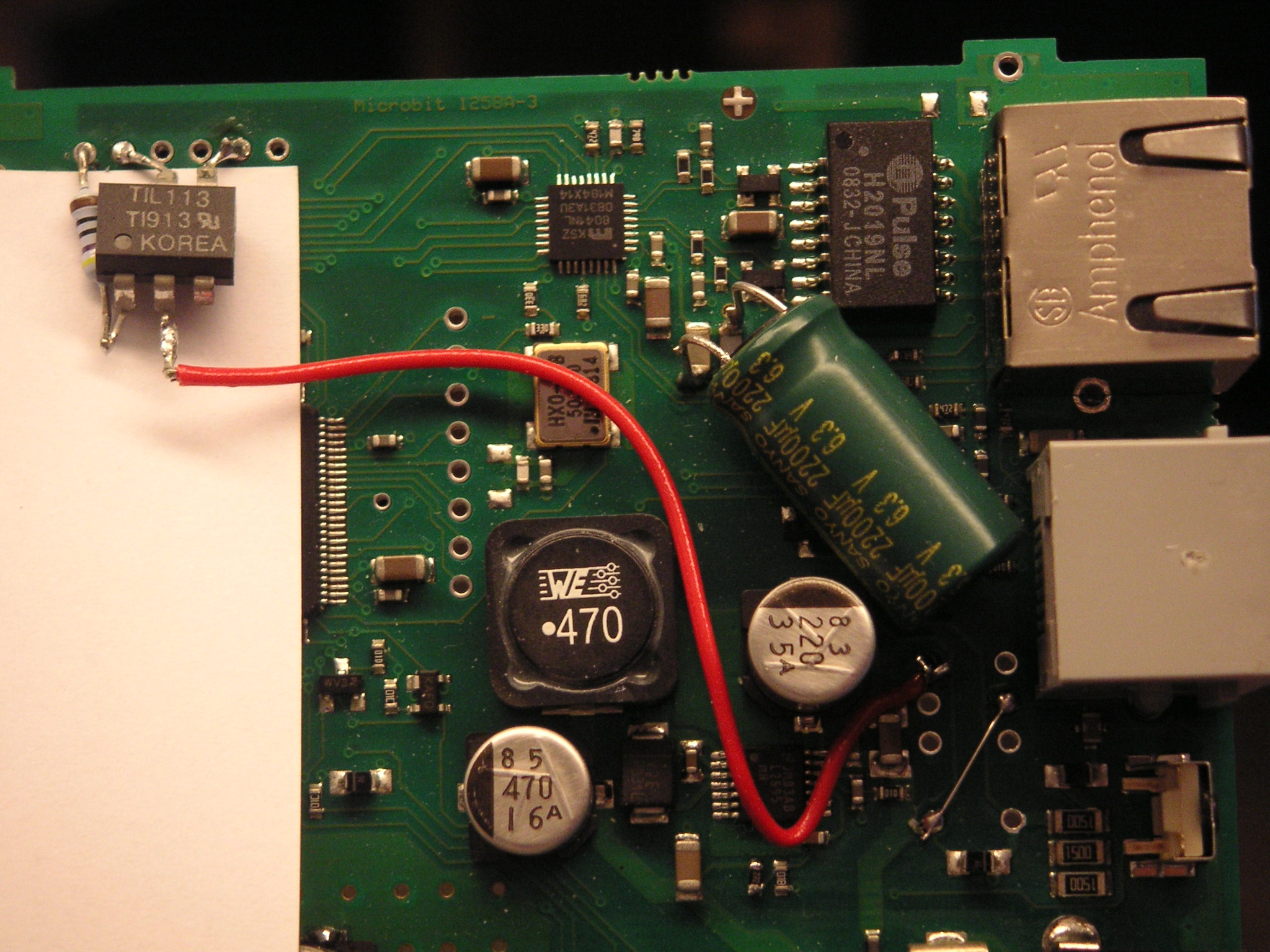
skapa med en OPTO-kopplare mellan ingången och CPU:n. Jag använde vad jag
hade, en TIL-113, ett 470R motstånd och 5 cm tråd. Jag tror bilden nedan är allt som behövs som instruktion. Ingången
vill bli på pin 4 i I/O kontakten på baksidan av RRC:n. Ingången skall jordas för nyckling.
När CW-keyern är aktiverad så fungerar ingången parallellt med keyern så man
kan växla simultant mellan PC och paddlar. Jitterbuffern som beskrivits
tidigare är även aktiv för PC-ingången om den används.
Komihåg! PC-nycklings ingången som beskrivs här kan inte anslutas direkt
till en PC, det är en generell ingång som kan användas för vanlig telegrafi
nyckel eller liknande. Om du skall ansluta till PC:ns serieport behöver du
ett interface, se nedan.
Kabel ritning
Om du inte vill använda PC-nycklingsingången hoppa över de trådarna.
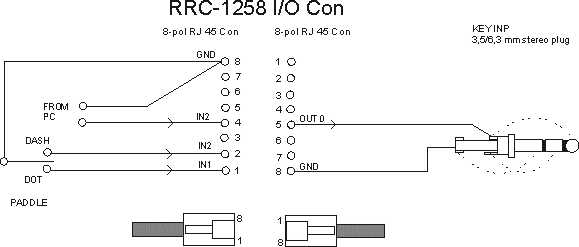
Jag gjorde en sådan här kabel.

PC Interface
Nedan finns ett schema som visar hur ett PC interface kan göras. Det finns många lösningar på Internet, men denna är mycket enkel och ryms i kontakthuset på D-suben. Inga värden är kritiska använd det du har i junkboxen.
Nedan finns den gamla lösningen med direkt nyckling beskriven
men jag rekommenderar att den nya lösningen ovan används om man inte har en mycket bra LAN liknande förbindelse.
|
CW med fjärrstyrd Radio alla moder |
|
Det är möjligt att köra fjärrstyrd CW genom koppla in en manipulator eller handpump till I/O ingångarna (baksidan) på RRC-1258. På motsvarande sätt ansluter man I/O utgångarna i den RRC som står vid radion till radions ELECTRONIC KEYER ingång eller motsvarande. Ritningar på adapterkablarna finns nedan. Överföring av ingång till utgång över Internetförbindelsen är gjord så snabb som möjligt genom att den är interuptstyrd. I princip fungerar det likadant som i IC-706:an (beskriven på annat ställe) där man kan ansluta manipulatorn till manöverpanelen men här är en generell lösning som fungerar till alla Radiostationer. Hur bra det fungerar beror på hur bra internetförbindelse man har har man kort och ganska konstant delay så funkar det bra. Troligen mindre bra om delay är lång och ännu sämre om delayen variar mycket. Det går inte bra om barnen i huset sitter och laddar hem DVD film samtidigt. Jag har som jag beskriver på annat ställe 55 km fågelvägen till mitt radio QTH och 80 km bilvägen. Delayen är mycket kort endast 7-8 ms (pingtid < 15 ms) och väldigt konstant så det funkar bra för mig. Man måste nog prova hur bra det funkar i praktiken, det kan nog vara bra att ha samma operatör i båda ändorna också, annars kanske signalen far till Stockholm och vänder. Här uppe i Norrland använder i princip alla operatörer Skanova oavsett vad dom heter själva. Att använda manipulator funkar också bättre än att vanlig nyckel eftersom keyern i radion slätar ut mindre tidsfel ganska bra, teckendelarna blir ju lika långa och teckendelsmellanrummen lika även om dom varierar något i överföringen. Med vanlig nyckel får man inte den effekten.
|